Python实现-BIT*-Batch Informed Tree 运动规划算法
RRT系列的采样规划算法,其随机采样特性可以有效解决维度灾难的问题
RRT*通过改进RRT的节点扩展方式,加入重连的机制,可以实现路径质量的渐近最优
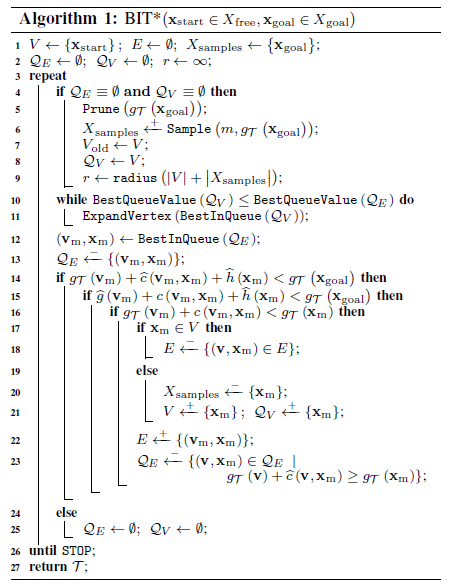
BIT*结合了采样规划算法和搜索规划算法的优势,引入节点排序和边排序,在超椭球子集中执行排序搜索,可以避免将无价值的节点和边加入到生成树中,下面是BIT*的伪代码
伪代码参考文献:
J. D. Gammell, S. S. Srinivasa, and T. D. Barfoot, “Batch informed trees BIT*: Sampling-based optimal planning via the heuristically guided search of implicit random geometric graphs,” in 2015 IEEE International Conference on Robotics and Automation (ICRA), May 2015, pp. 3067– 3074.
在伪代码中,有几个部分比较难以理解:
1、line10-11. 这两行实质是在对边队列进行扩展,如论文所说:
This value (vertex-queue value) is a lower bound estimate of the edge-queue values from a vertex
就是说,点的排序值,是经过该点的边的排序值的下界
line 10 对应只有某个点的排序值,比当前边的最好排序值还要好,这个点才会被用于去扩展边。否则,这个点扩展出来的边肯定不会比当前 edge-queue 里的最好边要好,那目前就没有扩展它的必要
2、line14-16. 这三行实质是在判断边的价值,是否应该把它加入到生成树中
line14,不等式左边其实就是这条边的排序值,也是目前 edge-queue 中的最小值,如果这个最小值都比当前路径长度要大,说明 edge-queue 里已经没有好的边了,也说明这是当前采样节点可以找到的最好的路径,因此需要进入下一个batch 加入新的采样节点
line15,主要是计算这条边之间是否可以到达,一般要通过碰撞检测这样的比较耗时的方式来计算,因此上一个不等式判断确实可以减少不必要的碰撞检测计算
line16,为了判断经过Vm是否可以对原节点价值带来提升
在满足上面三个条件的情况下,这条边才会真正加入到生成树中,如果Xm已经在树中,那就对应边从重连过程,相反就是边的扩展。
更多的细节可以参考原论文,下面给出上述算法的python实现主函数:
def plan(self, pathLengthLimit, choise):init_time = time.time()radius_constant = self.setup_planning()time_and_cost_set = []path = []for i in range(self.maxIter):if not self.vertex_queue and not self.edge_queue:c_best = self.g_scores[self.goal]path = self.get_best_path()self.prune(c_best)self.samples.extend(self.informed_sample(c_best, self.batch_size))self.old_vertices = set(self.vertices)self.vertex_queue = [(self.get_point_value(point),point) for point in self.vertices]heapq.heapify(self.vertex_queue) # change to op priority queueq = len(self.vertices)+len(self.samples)self.r = radius_constant * ((math.log(q) / q) ** (1.0/self.dimension))while self.bestVertexQueueValue() <= self.bestEdgeQueueValue():_, point = heapq.heappop(self.vertex_queue)self.expand_vertex(point)best_edge_value, bestEdge = heapq.heappop(self.edge_queue)# Check if this can improve the current solutionif best_edge_value < self.g_scores[self.goal]:actual_cost_of_edge = self.actual_edge_cost(bestEdge[0], bestEdge[1])actual_f_edge = self.heuristic_cost(self.start, bestEdge[0]) + actual_cost_of_edge + self.heuristic_cost(bestEdge[1], self.goal)if actual_f_edge < self.g_scores[self.goal]:actual_g_score_of_point = self.get_g_score(bestEdge[0]) + actual_cost_of_edgeif actual_g_score_of_point < self.get_g_score(bestEdge[1]):self.g_scores[bestEdge[1]] = actual_g_score_of_pointself.edges[bestEdge[1]] = bestEdge[0]if bestEdge[1] not in self.vertices:self.samples.remove(bestEdge[1])self.vertices.append(bestEdge[1])heapq.heappush(self.vertex_queue,(self.get_point_value(bestEdge[1]),bestEdge[1]))self.edge_queue = [ item for item in self.edge_queue if item[1][1]!=bestEdge[1] or \self.get_g_score(item[1][0]) + self.heuristic_cost(item[1][0],item[1][1])<self.get_g_score(item[1][0]) ]heapq.heapify(self.edge_queue) # Rebuild the priority queue because it will be destroyed after the element is removed# self.plot_function()# exit()else:self.vertex_queue = []self.edge_queue = []print("Step:", i, "Path Length:", self.g_scores[self.goal], "Planer: BIT*")
完整代码参考:https://github.com/hichenway/sampling-based-path-planning




























还没有评论,来说两句吧...