HOG+SVM实现目标检测
一、环境:VS2013+OpenCV3.0
看论文《Detection and Recognition of Traffic Planar Objects Using Colorized Laser Scan and Perspective Distortion Rectification》,Traffic Planar Objects Detection is implemented by the HoG+SVM。
HoG是在计算机视觉和图像处理中用于实现物体检测的特征描述子,出自论文:
Dalal N, Triggs B. Histograms of oriented gradients for human detection[C]//Computer Vision and Pattern Recognition, 2005. CVPR 2005. IEEE Computer Society Conference on. IEEE, 2005, 1: 886-893.(2016:Google Citation: 14046)
下载链接:https://hal.inria.fr/file/index/docid/548512/filename/hog_cvpr2005.pdf
HoG特征详细总结:https://www.cnblogs.com/wyuzl/p/6792216.html
二、函数参数分析
(1)detectMultiScal()
virtual void detectMultiScale(InputArray img, CV_OUT std::vector<Rect>& foundLocations,double hitThreshold = 0, Size winStride = Size(),Size padding = Size(), double scale = 1.05,double finalThreshold = 2.0, bool useMeanshiftGrouping = false) const;
共有8个参数:
img: 输入图像,可以是彩色图像也可以是灰度图像;
foundLocations:存取检测到的目标的位置;
hitThreshold(optional): The threshold for the distance from features to the SVM classifying plane;
winStride(optional): HoG检测窗口移动时的步长(水平和垂直)
padding(optional):在原图外围添加像素,常见的pad 尺寸包括(8,8),(16,16),(24,24),(32,32)
scale:图像的多尺度表示,每层图像都被缩小然后被高斯平滑,通常在[1.01-1.5];
finalThreshold:优化bounding box.
useMeanshiftGrouping:bool类型,表示是否用meanShift来消除重叠,默认为false.
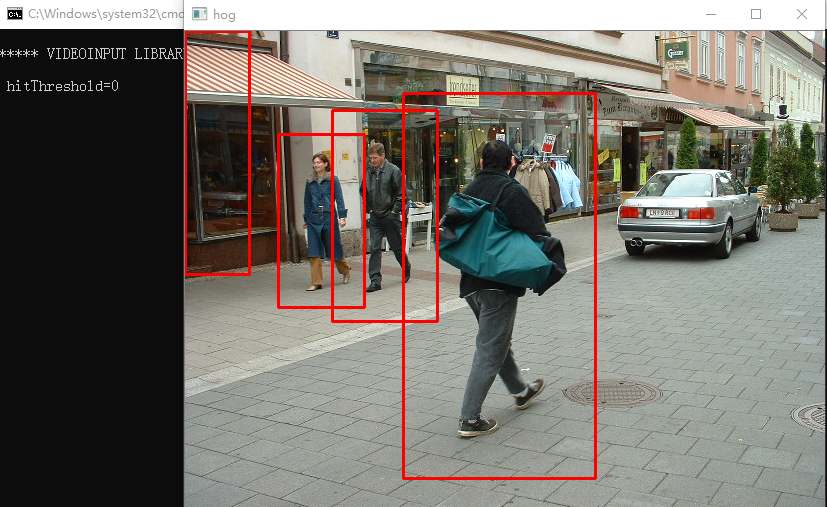
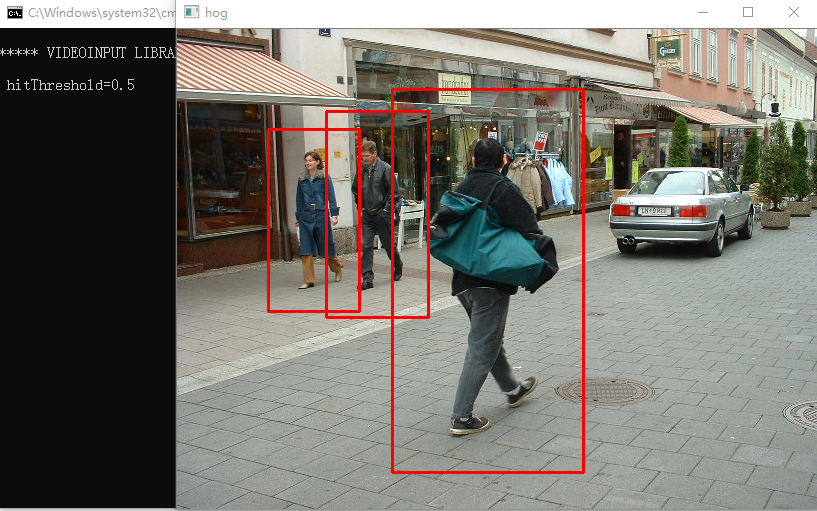
下面的三幅图hitThreshold分别为0, 0.5,1的检测结果:
hitThreshold=0
hitThreshold=0.5
hitThreshold=1
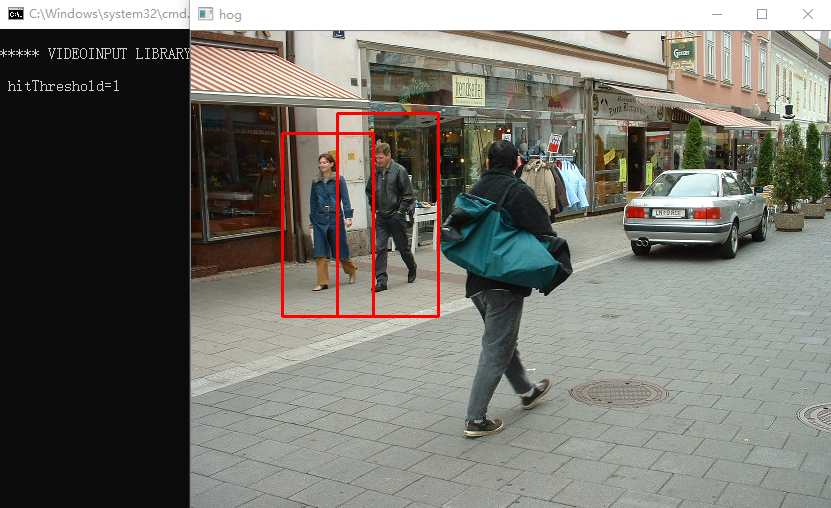
由此可见,参数的设置不同,对检测效果影响很大,每个参数都需要合理设置,才可以达到最佳的检测效果。
(2) rectangle(): 通过传入矩形参数来画矩形
CV_EXPORTS void rectangle(CV_IN_OUT Mat& img, Rect rec,const Scalar& color, int thickness = 1,int lineType = LINE_8, int shift = 0);
(3)rectangle():通过传入对角线两点来画矩形
CV_EXPORTS_W void rectangle(InputOutputArray img, Point pt1, Point pt2,const Scalar& color, int thickness = 1,int lineType = LINE_8, int shift = 0);
三、代码实现HoG行人检测:
#include <iostream>#include <opencv2/opencv.hpp>using namespace std;using namespace cv;int main(){Mat src = imread("person_293.bmp");if (!src.data){cout << "read image failed" << endl;return false;}//Define HOG ObjectHOGDescriptor hog; // 采用默认参数//Set SVM Classifierhog.setSVMDetector(HOGDescriptor::getDefaultPeopleDetector());//Detect the Pedestrians region on the test imagevector<Rect> regions;double hitThreshold=0.5;cout << " hitThreshold=" << hitThreshold << endl;hog.detectMultiScale(src, regions, hitThreshold, Size(8, 8), Size(32, 32), 1.05, 1);// Displayfor (size_t i = 0; i < regions.size(); i++){rectangle(src, regions[i], Scalar(0, 0, 255), 2); //对判定是行人的区域画矩形标记}imshow("hog", src);waitKey(0);return 0;}




























还没有评论,来说两句吧...