乐观锁悲观锁CAS锁自旋锁你了解吗?
文章目录
- 一,概念,使用场景
- 乐观锁
- 悲观锁
- 自旋锁
- 适用场景
- 二,实现方式
- 版本号机制
- CAS锁
- 乐观锁的缺点
- 1)ABA问题
- 2)循环时间长开销大
- 3)只能保证一个共享变量的原子操作
一,概念,使用场景
1. 乐观锁
总是假设最好的情况,每次去拿数据的时候都认为别人不会修改,所以不会上锁,但是在更新的时候会判断一下在此期间别人有没有去更新这个数据,可以使用版本号机制和CAS算法实现。
乐观锁适用于多读的应用类型,这样可以提高吞吐量,像数据库提供的类似于write_condition机制,其实都是提供的乐观锁。
2. 悲观锁
总是假设最坏的情况,每次去拿数据的时候都认为别人会修改,所以每次在拿数据的时候都会上锁,这样别人想拿这个数据就会阻塞直到它拿到锁(共享资源每次只给一个线程使用,其它线程阻塞,用完后再把资源转让给其它线程)。
传统的关系型数据库里边就用到了很多这种锁机制,比如行锁,表锁等,读锁,写锁等,都是在做操作之前先上锁。
3. 自旋锁
自旋锁(spinlock):是指当一个线程在获取锁的时候,如果锁已经被其它线程获取,那么该线程将循环等待,然后不断的判断锁是否能够被成功获取,直到获取到锁才会退出循环。
获取锁的线程一直处于活跃状态,但是并没有执行任何有效的任务,使用这种锁会造成busy-waiting。
它是为实现保护共享资源而提出一种锁机制。其实,自旋锁与互斥锁比较类似,它们都是为了解决对某项资源的互斥使用。无论是互斥锁,还是自旋锁,在任何时刻,最多只能有一个保持者,也就说,在任何时刻最多只能有一个执行单元获得锁。但是两者在调度机制上略有不同。对于互斥锁,如果资源已经被占用,资源申请者只能进入睡眠状态。但是自旋锁不会引起调用者睡眠,如果自旋锁已经被别的执行单元保持,调用者就一直循环在那里看是否该自旋锁的保持者已经释放了锁,”自旋”一词就是因此而得名。
4. 适用场景
乐观锁适用于写比较少的情况下(多读场景),即冲突真的很少发生的时候,这样可以省去了锁的开销,加大了系统的整个吞吐量。
但如果是多写的情况,一般会经常产生冲突,这就会导致上层应用会不断的进行retry,这样反倒是降低了性能,所以一般多写的场景下用悲观锁就比较合适。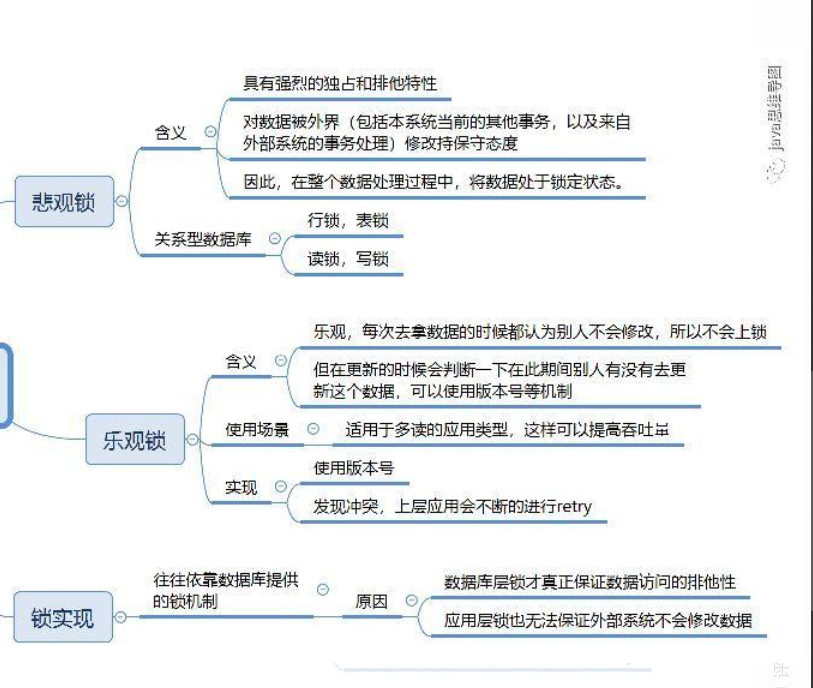
二,实现方式
乐观锁常见实现方式有两种
- 版本号机制
- CAS算法实现
1. 版本号机制
一般是在数据表中加上一个数据版本号version字段,表示数据被修改的次数,当数据被修改时,version值会加一。当线程A要更新数据值时,在读取数据的同时也会读取version值,在提交更新时,若刚才读取到的version值为当前数据库中的version值相等时才更新,否则重试更新操作,直到更新成功。
2. CAS锁
compare and swap(比较与交换),是一种有名的无锁算法。
无锁编程,即不使用锁的情况下实现多线程之间的变量同步,也就是在没有线程被阻塞的情况下实现变量的同步,所以也叫非阻塞同步(Non-blocking Synchronization)。
CAS算法涉及到三个操作数
- 需要读写的内存值 V
- 进行比较的值 A
- 拟写入的新值 B
当且仅当 V 的值等于 A时,CAS通过原子方式用新值B来更新V的值,否则不会执行任何操作(比较和替换是一个原子操作)。
一般情况下是一个自旋操作,即不断的重试。
3. 乐观锁的缺点
1)ABA问题
乐观锁通过CAS来判断一块空间是否被修改,是通过原来内存的值和进行比较的值进行比较得出的,那么问题是如果说V的值本来是A,先被修改成B在被修改成A, 那么在CAS锁看来,这块空间是没有被动过的,但是实际却已经被修改两次了。
解决方式:
- 添加一个标识,来标志空间是否被动过。
- 判断当前功能是否符合预期。
2)循环时间长开销大
自旋CAS(也就是不成功就一直循环执行直到成功)如果长时间不成功,会给CPU带来非常大的执行开销。
解决方式:处理器提供的pause指令。
- 延迟流水线执行指令(de-pipeline),使CPU不会消耗过多的执行资源,延迟的时间取决于具体实现的版本,在一些处理器上延迟时间是零。
- 避免在退出循环的时候因内存顺序冲突(memory order violation)而引起CPU流水线被清空(CPU pipeline flush),从而提高CPU的执行效率。
3)只能保证一个共享变量的原子操作
CAS 只对单个共享变量有效,当操作涉及跨多个共享变量时 CAS 无效。
解决方式:
可以把多个变量放在一个对象里来进行 CAS 操作.

























盒子模型,边框,内外边距,盒子模型布局,ps基本操作,列表样式,圆角边框,盒子阴影")








还没有评论,来说两句吧...