【新星计划】Matlab pid参数调节工具箱
之前写了一个关于pid调节的文章,传送门:基于Matlab GUI的PID研究
对于pid调节可以直接使用matlab自带的工具箱,

1、定义一个传递函数
>> sys = tf(1,[2 3 2])sys = 1 --------------- 2 s^2 + 3 s + 2 Continuous-time transfer function.
2、导入传递函数

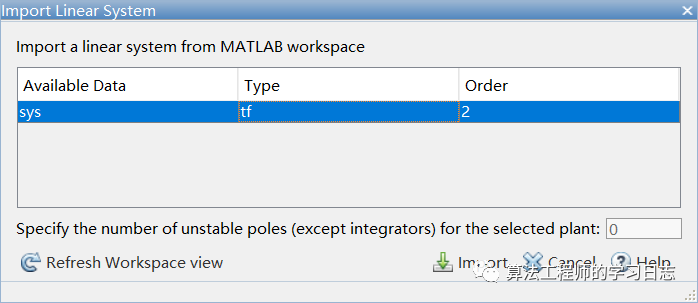
3、选择pid控制

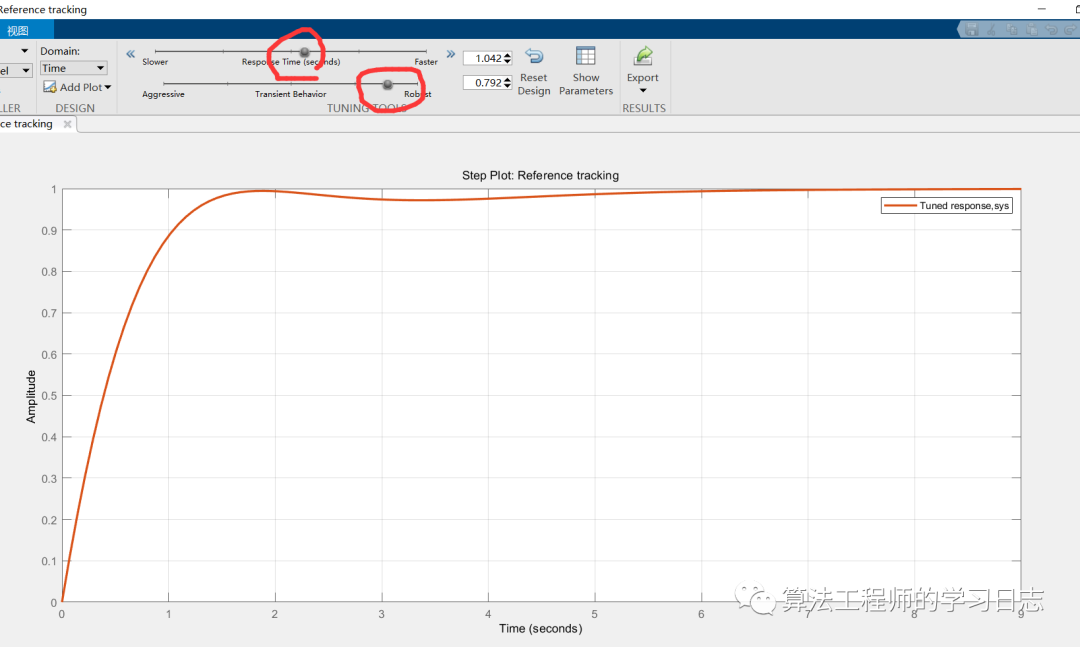
4、在结果可以实时看到控制的输出,通过调节系统的响应和鲁棒性,直到满足自己的期望,
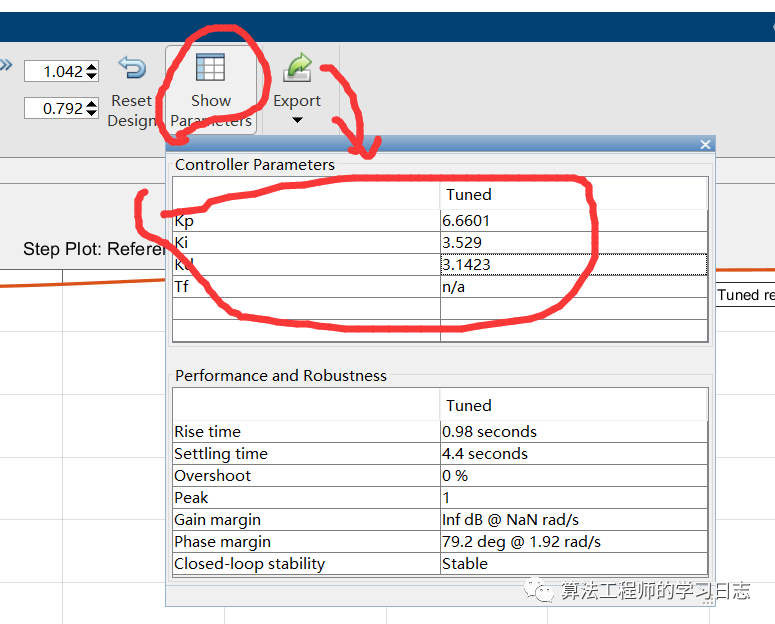
5、输出pid的调节参数
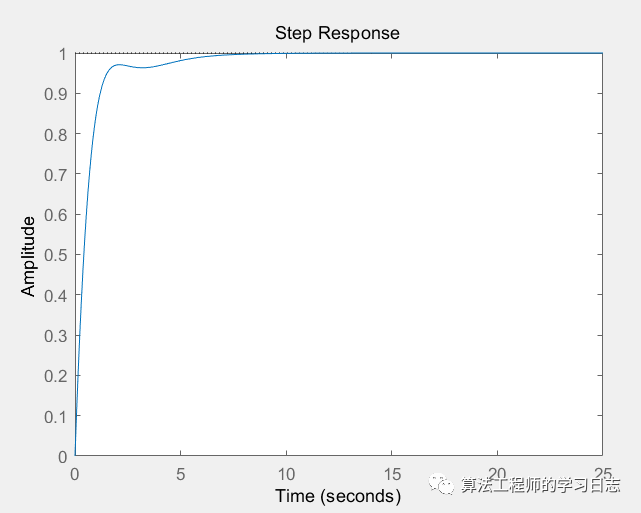
6、验证输出结果
>> pid(6,3,3)ans = 1 Kp + Ki * --- + Kd * s swith Kp = 6, Ki = 3, Kd = 3 Continuous-time PID controller in parallel form.>> c = pid(6,3,3)c = 1 Kp + Ki * --- + Kd * s swith Kp = 6, Ki = 3, Kd = 3 Continuous-time PID controller in parallel form.>> sys = feedback(c*sys,1)sys = 3 s^2 + 6 s + 3 ----------------------- 2 s^3 + 6 s^2 + 8 s + 3 Continuous-time transfer function.>> step(sys)
1、比例(P)系数的调节
比例系数P的调节范围一般是:0.1—100.
如果增益值取 0.1,PID 调节器输出变化为十分之一的偏差值。如果增益值取 100, PID 调节器输出变化为一百倍的偏差值。
可见该值越大,比例产生的增益作用越大。初调时,选小一些,然后慢慢调大,直到系统波动足够小,再调节积分或微分系数。过大的P值会导致系统不稳定,持续振荡;过小的P值又会使系统反应迟钝。合适的值应该使系统有足够的灵敏度但又不会反应过于灵敏,一定时间的迟缓要靠积分时间来调节。
2、积分(I)系数的调节
积分时间常数的定义是,偏差引起输出增长的时间。积分时间设为 1秒,则输出变化 100%所需时间为 1 秒。初调时要把积分时间设置长些,然后慢慢调小直到系统稳定为止。
3、微分(D)系数的调节
微分值是偏差值的变化率。例如,如果输入偏差值线性变化,则在调节器输出侧叠加一个恒定的调节量。大部分控制系统不需要调节微分时间。因为只有时间滞后的系统才需要附加这个参数。如果画蛇添足加上这个参数反而会使系统的控制受到影响。如果通过比例、积分参数的调节还是收不到理想的控制要求,就可以调节微分时间。初调时把这个系数设小,然后慢慢调大,直到系统稳定。


























truffle + web3 + webpack Metcoin 运行")







还没有评论,来说两句吧...