树莓派 Raspberry Pi 基于 wiringPi库 舵机控制
舵机是伺服电机的一种,在日常的开发中经常会用到。在此调用wiringPi库来控制舵机,如果没有安装wiringPi库的朋友可以看另外一篇博客wiringPi安装教程。
舵机介绍
舵机一般体积比较小,扭矩虽然不是大,但是足够带动运动装置,很方便在小车、航模上使用,大家购买时注意舵机的转动角度,有55度的,180度,360度的等等,大家可以根据需要购买。
舵机工作原理简介
舵机的控制信号由接收机的通道进入信号调制芯片,获得直流偏置电压。它内部有一个基准电路,产生周期为20ms,宽度为1.5ms的基准信号,将获得的直流偏置电压与电位器的电压比较,获得电压差输出。最后,电压差的正负输出到电机驱动芯片决定电机的正反转。当电机转速一定时,通过级联减速齿轮带动电位器旋转,使得电压差为0,电机停止转动。
舵机的控制一般需要一个20ms左右的时基脉冲,该脉冲的高电平部分一般为0.5ms-2.5ms范围内的角度控制脉冲部分,总间隔为2ms。以180度角度伺服为例,那么对应的控制关系是这样的:
| 高电平时间 | 对应位置 |
|---|---|
| 0.5ms | 0度 |
| 1.0ms | 45度 |
| 1.5ms | 90度 |
| 2.0ms | 135度 |
| 2.5ms | 180度 |
也就是说当对舵机输入相同控制信号时,舵机会运动到固定位置,他的动作不是做圆周运动,而是在运动范围内,每一个位置对应一个控制信号。
因此我们需要在将舵机安装在固定架上之前,需要先将舵机初始化好,舵机一般为三根线:棕色——GND,红色——VCC,橙色——控制信号。
舵机接线
在此将舵机棕色线接到GND,红色线接到+5V引脚,橙色线接到GPIO.29引脚,如图所示
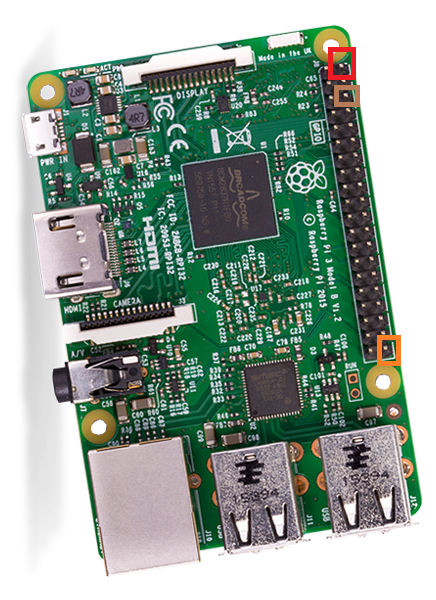
树莓派如图所示防止==放置,右排第一个为 +5v引脚,右排第三个引脚为 GND引脚,右排最后一个引脚为 GPIO.29,在输入 gpio readall命令后的引脚命名图中对应位置也可以看到。 注意:代码中使用的引脚号是“BCM对应的引脚号”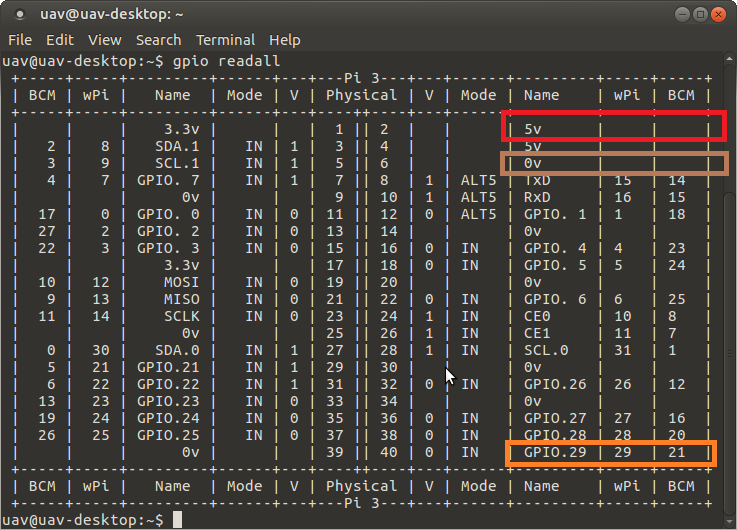
C语言代码
创建servo.cpp文件
vim servo.cpp
写入下列代码
#include <stdio.h>#include <errno.h>#include <string.h>#include <wiringPi.h>int pwmPin = 18;int main(){// if (wiringPiSetup() == -1)// {// fprintf(stdout, "oops: %s\n", strerror(errno));// return 1;// }wiringPiSetupGpio ();pinMode (pwmPin, PWM_OUTPUT);pwmSetMode (PWM_MODE_MS);pwmSetRange (2000);pwmSetClock (192);pwmWrite(pwmPin, 150);delay(1000);pwmWrite(pwmPin, 200);return 0;}
编译servo.cpp,注意要链接wiringPi库
gcc servo.cpp -o servo -lwiringPi
运行编译后的文件
sudo ./servo
注意一定要加sudo权限,否则wiringPi某些版本执行./servo的时候会报错权限不够
python代码
创建servo.py文件
vim servo.py
写入以下代码
# -*- coding: utf-8 -*-#!/usr/bin/env pythonimport RPi.GPIO as GPIOimport timeimport signalimport atexitatexit.register(GPIO.cleanup)servopin = 21GPIO.setmode(GPIO.BCM)GPIO.setup(servopin, GPIO.OUT, initial=False)p = GPIO.PWM(servopin,50) #50HZp.start(0)time.sleep(2)while(True):for i in range(0,181,10):p.ChangeDutyCycle(2.5 + 10 * i / 180) #设置转动角度time.sleep(0.02) #等该20ms周期结束p.ChangeDutyCycle(0) #归零信号time.sleep(0.2)for i in range(181,0,-10):p.ChangeDutyCycle(2.5 + 10 * i / 180)time.sleep(0.02)p.ChangeDutyCycle(0)time.sleep(0.2)
输入命令运行代码
python servo.py



























![洛谷 P1169 [ZJOI2007]棋盘制作](https://image.dandelioncloud.cn/images/20230808/72ba490c52904facb1bad28940d1f12a.png "洛谷 P1169 [ZJOI2007]棋盘制作")





还没有评论,来说两句吧...